Editing docs_architecture
Attachments (1)
-
architecture.png (76.0 KB) - added by 15 years ago.
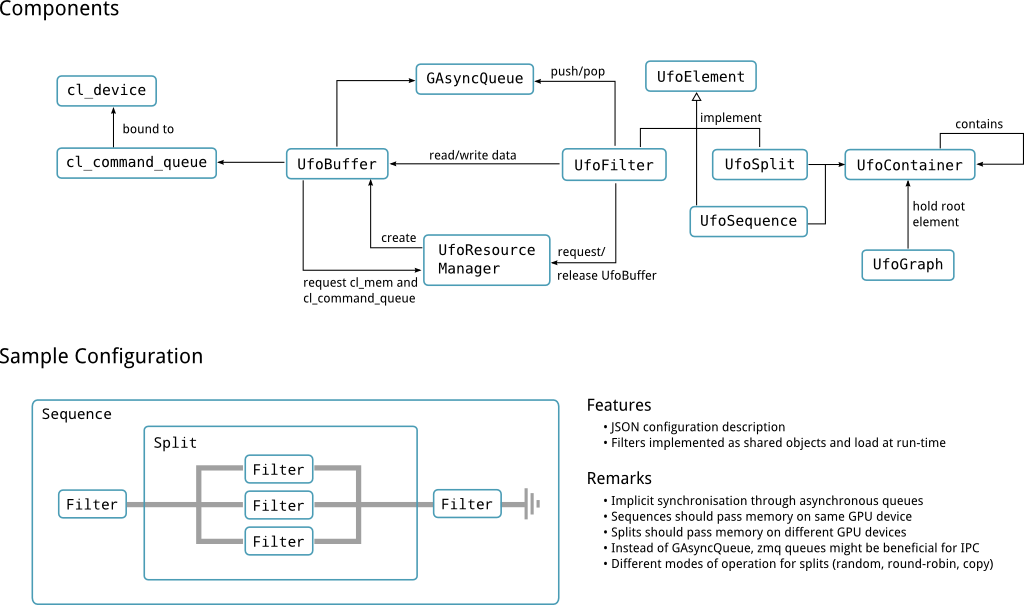
Software architecture of UFO
{kind=link}
{kind=link}
Download all attachments as: .zip
Software architecture of UFO
Download all attachments as: .zip
Powered by Trac 1.2.4
By Edgewall Software.
Visit the Trac open source project at
http://trac.edgewall.org/